ADS1146器件是高精度 16 位模数转换器(ADC),集成了众多功能,可降低传感器测量应用中的系统成本和组件数量。这些器件具有低噪声、可编程增益放大器(PGA)、高精度的 (ΔΣ)ADC 以及单周期稳定数字滤波器和内部振荡器。
本文将介绍对ADS1146的外部电路设计和利用RT-Thread实现去ADS1146的电路驱动。
电路设计
首先利用电压基准芯片生成稳定的1.25V电压作为ADS1146的偏置电压。如果使用的是ADS1147或ADS1148的话,内部可生成2.408V的偏置电压,可以不使用外部电压作为偏执电压。电压基准电路如图。
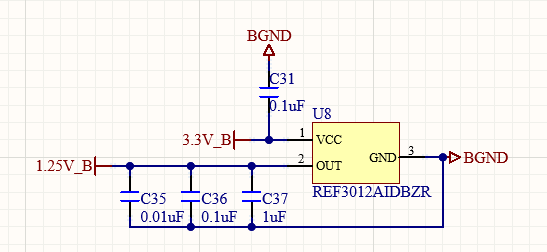
使用外部电压的好处是,外部电压稳定,能提高测量精度;外部电压可调节,可以按需求选择量程。
模拟电压AVCC范围为2.7V——5.25V,外部偏置电压要求范围在0.5V——AVCC-1V,也就是说最大范围可为0.5V——4.25V。
测量的输入电压只能在外部偏置电压的绝对值范围内。部分手册参数如图。
具体的ADS1146电路如图所示,
DVDD、DGND号脚作为数字电源输入,0.1uf电容经常作为芯片电源的旁路电容使用。
CLK短接DGND可激活内部时钟。
RESET为复位引脚,低电平有限,搭配C5和R5可上电初始时自动复位。
REFP、REFN作为外部偏置电压输入。
AINP、AINN作为测量引脚输入,该输入是一个差分信号。将AINN端接至REEP,优点是可以实现正负双向测量。也就是说AINN端稳定为1.25V,AINP在外部测量信号作用下在0——2.5V变化,差分电压在-1.25——1.25V变化,实现了正负双向测量。如果不AINN不接REEP,也就是AINN为0V,AINP必须大于0,那差分电压只能在0——1.25V变化,只能单向测量。
C8用于滤除差模干扰、C14、C15可滤除共模干扰,R10、R11可减少输入差分信号的纹波。R12、R13为下拉电阻,悬空时,AINP下拉至0V、AINN因为端接REEP,会保持1.25V不变,这么看R13似乎没有作用,但是在共模信号上R13可与R12保持对称,这样在滤除共模干扰会达到同程度滤除,可避免引入差模干扰。也就是说悬空时会采集到-1.25V。
SPI的四个引脚用来实现SPI通信,这个大家都知道。
START用于发送芯片启动转换信号。
DRDY用于接受转换完成信号。
AVDD、AVSS是模拟电压输入端,通过磁珠M1和C9可以接入数字信号源,不过为了避免干扰,在PCB布局时最好模拟电压区域和数字电压区域隔开,只留一个通路连接。
右端每个信号都串接了47R电阻、这些电阻可平滑尖锐的过渡,抑制过冲,并提供一定的过压保护。
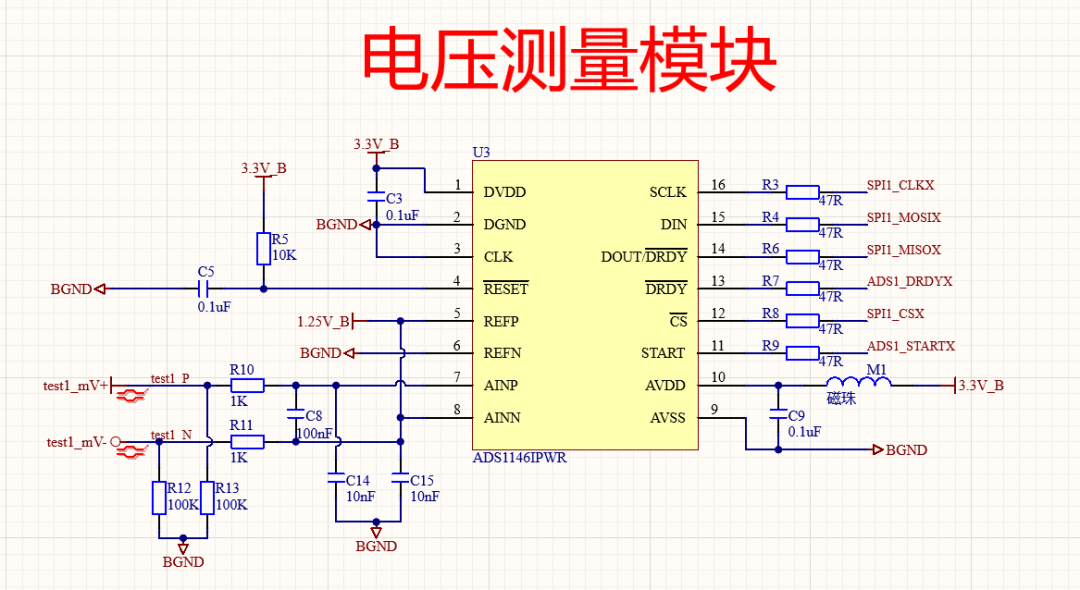
因为我这里ADS1146模块使用的电源和MCU使用的不是同一类电源,所以通信接口必须使用以下这种数字信号转换器进行连接,此时上面信号上的47R电阻可接可不接,应为数字信号转换器具有抑制过冲、电压保护等功能。如果是信号直接接入MCU,该47R还是建议使用的。
到这,ADS1146的外围电路设计已经完成了,下面开始使用RT-Thread实现程序开发。
RT-Thread 程序开发
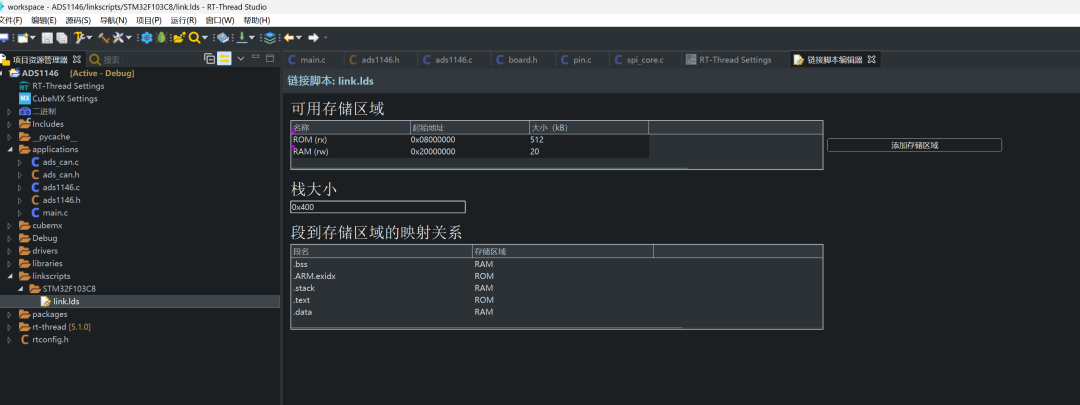
这里是基于RT-Thread studio实现ADS1146对电压的精准采集,开发板是我自己画的,MCU是STM32F103C8T6,使用的RT-Thread驱动是5.1.0
(如果遇到无法下载情况,可以把该位置ROM的值调大一点,STM32F103C8T6的实际ROM只有64KB,代码编译完达到了100KB,所以就无法下载,但是实际下载进芯片,发现实际只占用了不到一半ROM,所以我这自行调整到512KB来规避检查,实际的占用情况可以在finsh控制台使用free命令查看)
创建工程
5.1.0的驱动对stm32的支持,可以参考文章《基于RT-Thread的STM32F4开发第八讲——SPI(普通、DMA、SFUD)》(链接:https://blog.csdn.net/weixin_58172114/article/details/148234716?spm=1001.2014.3001.5502)完成工程的创建(普通模式即可)。嫌麻烦的可以用4系类的驱动。
下面主要讲解ADS1146驱动代码实现
ads1146.c
代码总览如下:
/** Copyright (c) 2006-2021, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2025-09-28 H1567 the first version*/#include"ads1146.h"#defineDBG_TAG "ads1146"#defineDBG_LVL DBG_LOG#include
别看代码很长,因为写了很多预编译语句(也就是选择性编译的语句)。
“#ifdef标识符”
程序段
“#endif”
如果在这之前标识符经过了#define定义,则编译程序段,否则编译时略过程序段。
第一个函数void SPI_device_creation(void)
用来对SPI设备初始化,因为ADS1146是通过SPI通讯的,所以需要完成对应的SPI初始化,这里通过预编译指令类比写了SPI1、SPI2、SPI3三个外设初始化,基本能囊括所有SPI设备了,如实际中超出,例如使用的是SPI4,可按模板自行添加。
注意board.h要开启对应SPI的宏定义。
代码主要工作完成了ADS1146的SPI片选引脚确认、通信模式、通信字节、通信速度的设置。其中片选引脚需要更改为自己实际使用的引脚,通信速度不建议过高,其他内容不建议更改。
第二个函数void ADS1146_init(void)
完成ADS1146的初始化,主要是向ADS1146发送了三个命令。
0x01:将ADS1146从睡眠中唤醒,

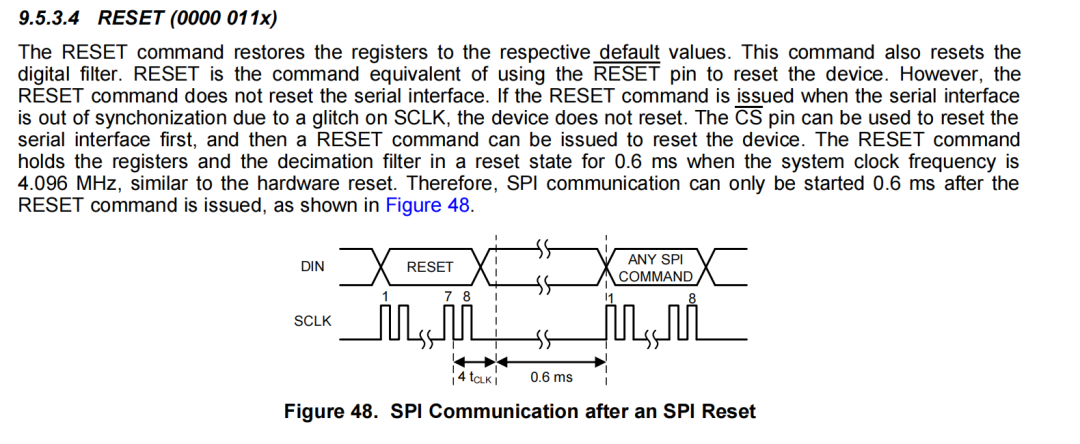
0x06:将ADS1146复位,准备下面的工作。(注:因为ADS1146复位需要0.6ms时间,这个时间段不能继续发送命令,我这给了10ms)
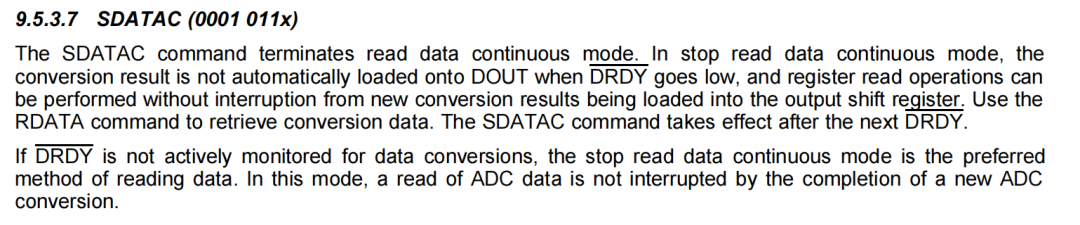
0x16:停止数据读取,当前配置未完成,防止错误数据输出(保险,可加可不加)
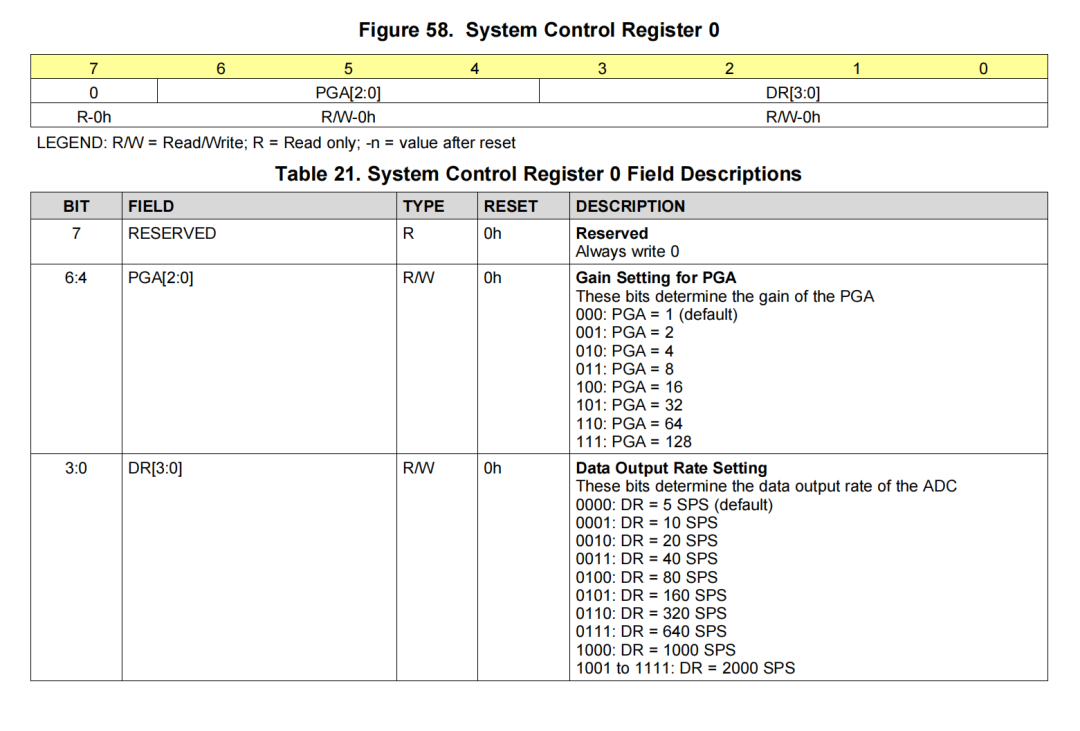
第三个函数void ADS1146_setPGA(struct rt_spi_device *device,short ADS_setPGA)
该函数有两个形参,device:传入的设备名;ADS_setPGA:需要设置的PGA十进制值
该函数能够将设置的PGA值写入ADS1146,主要命令是0x43。
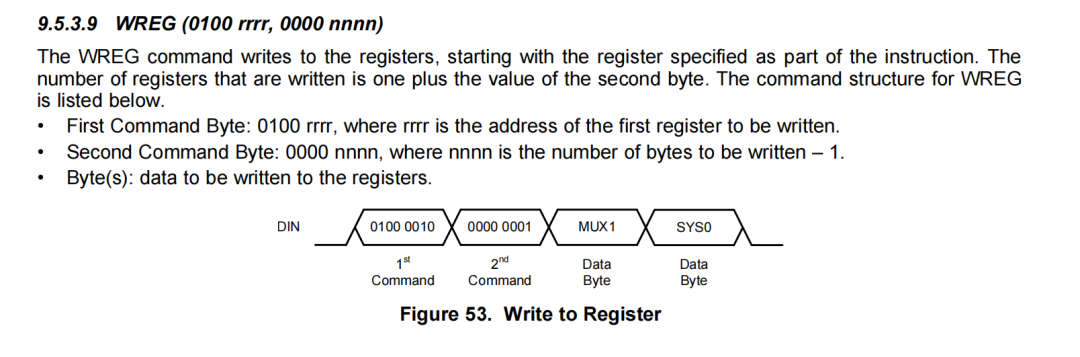
0x43表示写入的寄存器如下
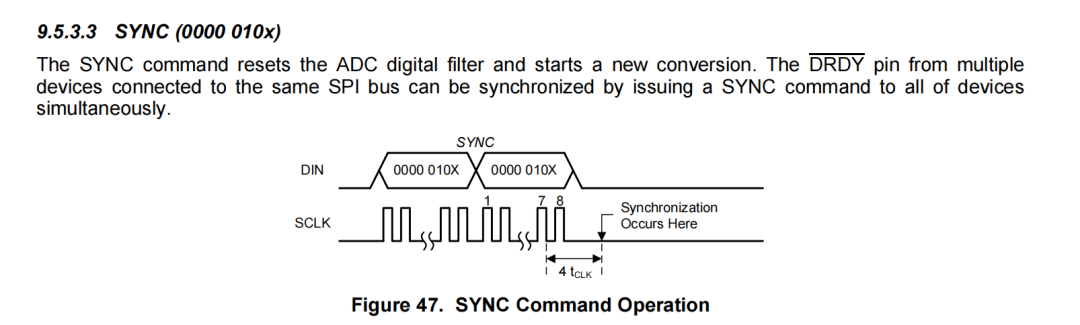
0x04 0x04表示开始转换
第四个函数short ADS1146_readPGA(struct rt_spi_device *device)
device:传入的设备名
该函数能够将传入设备读取的PGA值以十进制返回,主要命令是0x23
第五个函数short ADS1146_PGA_AUTO(struct rt_spi_device *device)
evice:传入的设备名
该函数属于最核心函数,能够根据测量的数值自动调节该设备PGA,从而达到自动调节量程,实现最精准测量。并且我还特别优化,能实现快速响应。这部分代码不讲解,能理解就是你的,理解不了直接用就行。
第六个函数void ADS1146_output(struct rt_spi_device *device,float calibration_k,float calibration_b,short PGA_flag);
实现ADS1146采集的电压值输出,单位mV
device:传入的设备名;
calibration_k, calibration_b: 校准参数
校准函数:ADS_CCD_mV = calibration_k*ADS_mV + calibration_b
PGA_flag:量程标志,0:正常,1:超量程。搭配ADS1146_PGA_AUTO使用可实现自动判断
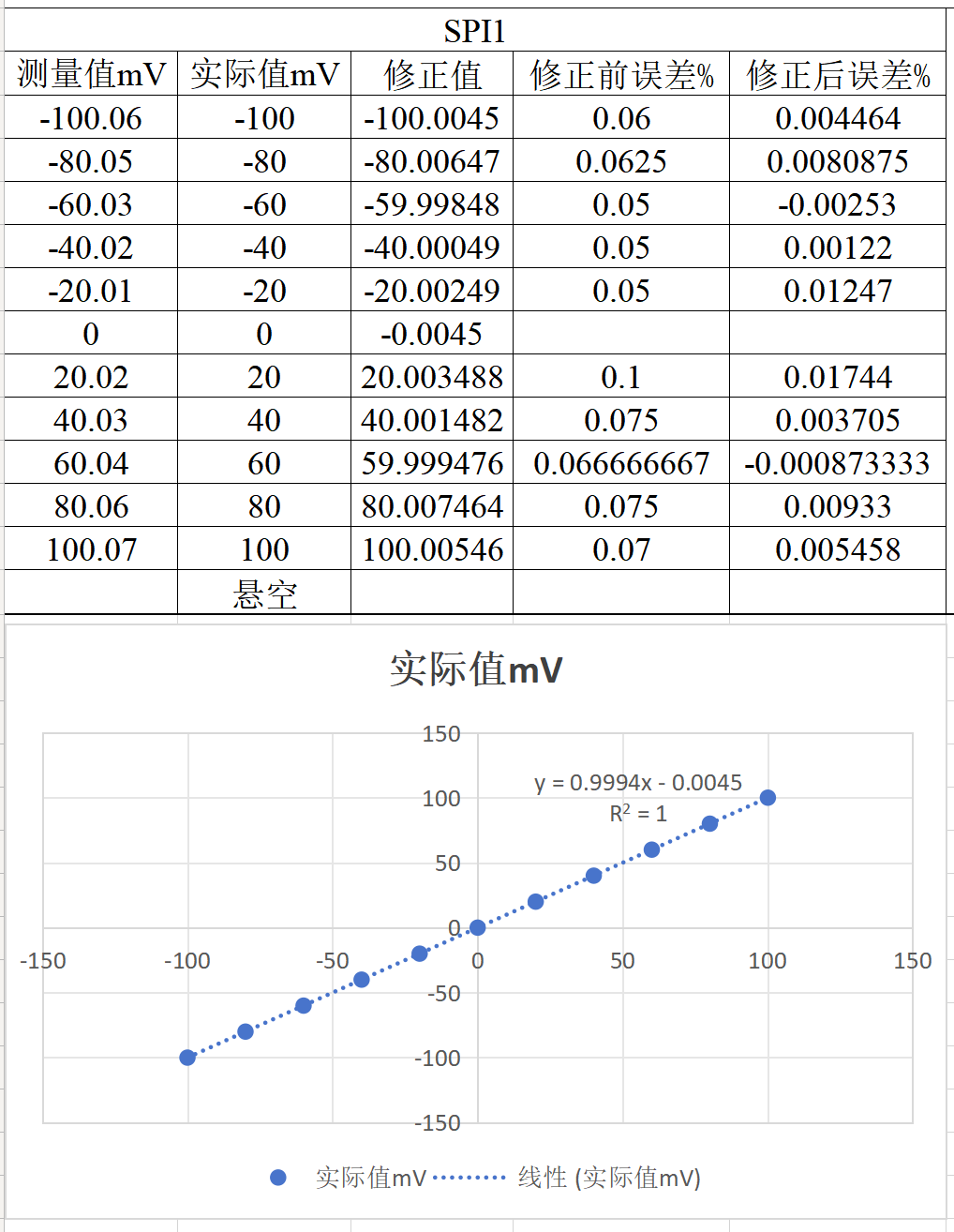
这一个函数就是将读取的电压值输出出来,我这里直接rt_printf,如果需要返回值,可自行拓展。其中 calibration_k, calibration_b是校准参数,我们知道实际值和测量值之间是会存在误差的,这些误差并非都是随机误差,其中很大一部分是具有线性特征的系统误差,这部分误差可以通过一个线性函数来弥补,下图是我通过采集的实际值和测量值计算出来的一次函数,带入函数也就是calibration_k = 0.9994,calibration_b = -0.0045
不过这写数据实在PGA = 8恒定下采集的值,为了省事,我直接运用到了全局PGA中,所以在PGA = 8时校准效果最好,不过应用到其他PGA上也有不错的效果,如果大家有需要,可以将各个PGA下的校准函数求出,搭配ADS1146_PGA_AUTO函数实现更加精准测量。
ads1146.h
#ifndefAPPLICATIONS_ADS1146_H_#defineAPPLICATIONS_ADS1146_H_#include#include#include"drv_spi.h"#include/*-------------------------- ADS1146 CONFIG BEGIN --------------------------*///需要在board.h中开启对于的SPI预编译#defineBSP_USING_SPI1_ADS1146#defineBSP_USING_SPI2_ADS1146//#define BSP_USING_SPI3_ADS1146#ifdefBSP_USING_SPI1_ADS1146 #define SPI1_NAME "spi10" #define SPI1_BUS_NAME "spi1"externstructrt_spi_device *ads1146_handle1;#endif#ifdefBSP_USING_SPI2_ADS1146 #define SPI2_NAME "spi20" #define SPI2_BUS_NAME "spi2"externstructrt_spi_device *ads1146_handle2;#endif#ifdefBSP_USING_SPI3_ADS1146 #define SPI3_NAME "spi30" #define SPI3_BUS_NAME "spi3"externstructrt_spi_device *ads1146_handle3;#endif// 更改为自己实际的引脚#define ADS1_start GET_PIN(B,0)#define ADS1_drdy GET_PIN(B,1)#define ADS2_start GET_PIN(B,10)#define ADS2_drdy GET_PIN(B,11)#define ADS3_start GET_PIN(B,10)#define ADS3_drdy GET_PIN(B,11)#define ADS_SPS 0x01 //10 SPS#define ADS_range_half 32768#define reference_voltage 1250voidSPI_device_creation(void);voidADS1146_init(void);voidADS1146_setPGA(structrt_spi_device *device,shortADS_setPGA);shortADS1146_readPGA(structrt_spi_device *device);shortADS1146_PGA_AUTO(structrt_spi_device *device);voidADS1146_output(structrt_spi_device *device,floatcalibration_k,floatcalibration_b,shortPGA_flag);
这里面就是各种宏定义,函数声明。大家都知道
因为我做了大量SPI适配的预编写语句,所以在board.h开启SPI宏定义后,这边再开启对应的ADS1146宏定义就能直接使用,开启了SPI宏定义不开启ADS1146宏定义不会对该SPI有任何影响,其他设备正常使用。
//需要在board.h中开启对于的SPI预编译
#defineBSP_USING_SPI1_ADS1146#defineBSP_USING_SPI2_ADS1146//#define BSP_USING_SPI3_ADS1146
main.h
#include#defineDBG_TAG"main"#defineDBG_LVL DBG_LOG#include#include"ads1146.h"#include"ads_can.h"intmain(void){ shortPGA_flag1; SPI_device_creation(); ADS1146_init(); while(1){ PGA_flag1 =ADS1146_PGA_AUTO(ads1146_handle1); ADS1146_output(ads1146_handle1,0.9994,-0.0045, PGA_flag1); rt_thread_mdelay(800); } returnRT_EOK;}
经过前面的解释,相信大家很容易看懂这部分代码。
效果演示
ADS1146Not calibrated output data:0.812mV ADS1146 calibrated output data:0.807mVADS1146set PGA:128ADS1146Not calibrated output data:0.758mV ADS1146 calibrated output data:0.753mVADS1146set PGA:128ADS1146Not calibrated output data:0.691mV ADS1146 calibrated output data:0.686mVADS1146set PGA:128ADS1146Not calibrated output data:0.067mV ADS1146 calibrated output data:0.062mVADS1146set PGA:128ADS1146Not calibrated output data:0.030mV ADS1146 calibrated output data:0.025mVADS1146set PGA:128ADS1146Not calibrated output data:0.018mV ADS1146 calibrated output data:0.014mVADS1146set PGA:128ADS1146Not calibrated output data:0.015mV ADS1146 calibrated output data:0.011mVADS1146set PGA:32ADS1146Not calibrated output data:25.015mV ADS1146 calibrated output data:24.995mVADS1146set PGA:32ADS1146Not calibrated output data:25.011mV ADS1146 calibrated output data:24.992mVADS1146set PGA:32ADS1146Not calibrated output data:25.012mV ADS1146 calibrated output data:24.993mVADS1146set PGA:16ADS1146Not calibrated output data:50.032mV ADS1146 calibrated output data:49.998mVADS1146set PGA:16ADS1146Not calibrated output data:50.030mV ADS1146 calibrated output data:49.995mVADS1146set PGA:16ADS1146Not calibrated output data:75.040mV ADS1146 calibrated output data:74.990mVADS1146set PGA:16ADS1146Not calibrated output data:75.042mV ADS1146 calibrated output data:74.993mVADS1146set PGA:8ADS1146Not calibrated output data:100.064mV ADS1146 calibrated output data:100.000mVADS1146set PGA:8ADS1146Not calibrated output data:100.069mV ADS1146 calibrated output data:100.005mVADS1146set PGA:8ADS1146Not calibrated output data:100.079mV ADS1146 calibrated output data:100.014mVADS1146set PGA:8ADS1146Not calibrated output data:100.050mV ADS1146 calibrated output data:99.985mVADS1146set PGA:128ADS1146Not calibrated output data:0.098mV ADS1146 calibrated output data:0.093mVADS1146set PGA:128ADS1146Not calibrated output data:0.100mV ADS1146 calibrated output data:0.095mVADS1146set PGA:128ADS1146Not calibrated output data:0.103mV ADS1146 calibrated output data:0.098mVADS1146set PGA:1ADS1146Not calibrated output data:1000.671mV ADS1146 calibrated output data:1000.066mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1000.710mV ADS1146 calibrated output data:1000.105mVADS1146set PGA:1ADS1146Not calibrated output data:1041.870mV ADS1146 calibrated output data:1041.240mVADS1146set PGA:1ADS1146Not calibrated output data:1200.600mV ADS1146 calibrated output data:1199.875mVADS1146set PGA:1ADS1146Not calibrated output data:1204.987mV ADS1146 calibrated output data:1204.259mVADS1146set PGA:1ADS1146Not calibrated output data:1220.818mV ADS1146 calibrated output data:1220.081mVADS1146set PGA:1ADS1146Not calibrated output data:1220.818mV ADS1146 calibrated output data:1220.081mVADS1146set PGA:1ADS1146Not calibrated output data:1230.583mV ADS1146 calibrated output data:1229.840mVADS1146set PGA:1ADS1146Not calibrated output data:1240.692mV ADS1146 calibrated output data:1239.943mVADS1146set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:1ADS1146Exceeding the range ADS1146 set PGA:2ADS1146Not calibrated output data:359.287mV ADS1146 calibrated output data:359.067mVADS1146set PGA:32ADS1146Not calibrated output data: -12.507mV ADS1146 calibrated output data: -12.504mVADS1146set PGA:128ADS1146Not calibrated output data: -0.660mV ADS1146 calibrated output data: -0.664mVADS1146set PGA:128ADS1146Not calibrated output data: -0.497mV ADS1146 calibrated output data: -0.501mV
上面是我的一点运行日志,这边输入的是0mv、25mv、50mv、75mv、100mv、1000mv,~~。大家可以比较一下,优化校准哈桑农户,测量还是能达到uV级别的。
- 随机文章
- 热门文章
- 热评文章
- 蓉小香招商加盟强势抢滩中——带不走的川味老卤冒烤鸭
- 招商轮船(601872):招商轮船2023年第三次临时股东大会通知
- 美股明年如何投资?富国银行给出建议:卖中小盘股、坚守大盘股
- 强生(JNJ.US)10亿美元引进口服多肽积极试验结果公布
- 付费面试辅导服务靠谱吗?真假难辨,有人上岸有人踩坑
- 俄提出描述伤口愈合的数学模型
- “美版贴吧”Reddit:预计2024年营收将增长20%以上
- 江苏金坛新出土中国史前保存完好的最大石钺

